
2.8K
The MAG3110 is a small, low-power digital 3D magnetic sensor with a wide dynamic range to allow operation in PCBs with high extraneous magnetic fields. The MAG3110:
- Measures the components of the local magnetic field, the sum of the geomagnetic field and the magnetic field created by components on the circuit board
- Can be used in conjunction with a 3-axis accelerometer so that orientation-independent accurate compass heading information may be achieved
- Features a standard I²C serial interface and is capable of measuring local magnetic fields up to 10 Gauss with output data rates up to 80 Hz
Features
- 80 Hz maximum sampling rate
- I²C interface 400 kHz
- -40°C to +85°C operation
- 0.95 to 3.6-volt supply
- Full-scale range ±1000 µT
- Low-power, single-shot measurement mode
- Noise down to 0.25 µT rms
- Sensitivity of 0.10 µµT

Parts Required
Here are the parts I used
you can connect to the sensor using a standard header the classic dupont style jumper wire.
| Name | Link | |
| ESP32 |  |
|
| MAG3110 | ||
| Connecting cables |  |
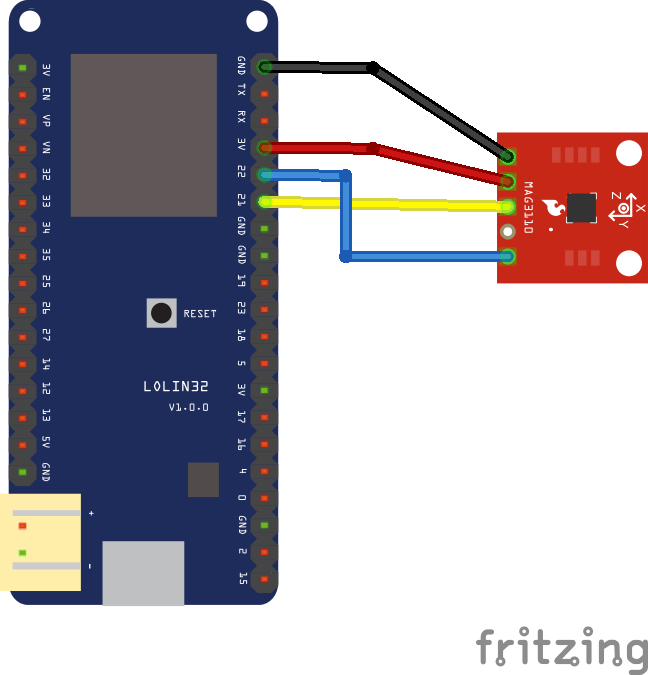
Layout
Code
#include <Wire.h>
#define MAG_ADDR 0x0E //7-bit address for the MAG3110, doesn't change
void setup()
{
Wire.begin(); // join i2c bus (address optional for master)
Serial.begin(9600); // start serial for output
config(); // turn the MAG3110 on
}
void loop()
{
print_values();
delay(5);
}
void config(void)
{
Wire.beginTransmission(MAG_ADDR); // transmit to device 0x0E
Wire.write(0x11); // cntrl register2
Wire.write(0x80); // send 0x80, enable auto resets
Wire.endTransmission(); // stop transmitting
delay(15);
Wire.beginTransmission(MAG_ADDR); // transmit to device 0x0E
Wire.write(0x10); // cntrl register1
Wire.write(1); // send 0x01, active mode
Wire.endTransmission(); // stop transmitting
}
void print_values(void)
{
Serial.print("x=");
Serial.print(readx());
Serial.print(",");
Serial.print("y=");
Serial.print(ready());
Serial.print(",");
Serial.print("z=");
Serial.println(readz());
}
int readx(void)
{
int xl, xh; //define the MSB and LSB
Wire.beginTransmission(MAG_ADDR); // transmit to device 0x0E
Wire.write(0x01); // x MSB reg
Wire.endTransmission(); // stop transmitting
delayMicroseconds(2); //needs at least 1.3us free time between start and stop
Wire.requestFrom(MAG_ADDR, 1); // request 1 byte
while(Wire.available()) // slave may send less than requested
{
xh = Wire.read(); // receive the byte
}
delayMicroseconds(2); //needs at least 1.3us free time between start and stop
Wire.beginTransmission(MAG_ADDR); // transmit to device 0x0E
Wire.write(0x02); // x LSB reg
Wire.endTransmission(); // stop transmitting
delayMicroseconds(2); //needs at least 1.3us free time between start and stop
Wire.requestFrom(MAG_ADDR, 1); // request 1 byte
while(Wire.available()) // slave may send less than requested
{
xl = Wire.read(); // receive the byte
}
int xout = (xl|(xh << 8)); //concatenate the MSB and LSB
return xout;
}
int ready(void)
{
int yl, yh; //define the MSB and LSB
Wire.beginTransmission(MAG_ADDR); // transmit to device 0x0E
Wire.write(0x03); // y MSB reg
Wire.endTransmission(); // stop transmitting
delayMicroseconds(2); //needs at least 1.3us free time between start and stop
Wire.requestFrom(MAG_ADDR, 1); // request 1 byte
while(Wire.available()) // slave may send less than requested
{
yh = Wire.read(); // receive the byte
}
delayMicroseconds(2); //needs at least 1.3us free time between start and stop
Wire.beginTransmission(MAG_ADDR); // transmit to device 0x0E
Wire.write(0x04); // y LSB reg
Wire.endTransmission(); // stop transmitting
delayMicroseconds(2); //needs at least 1.3us free time between start and stop
Wire.requestFrom(MAG_ADDR, 1); // request 1 byte
while(Wire.available()) // slave may send less than requested
{
yl = Wire.read(); // receive the byte
}
int yout = (yl|(yh << 8)); //concatenate the MSB and LSB
return yout;
}
int readz(void)
{
int zl, zh; //define the MSB and LSB
Wire.beginTransmission(MAG_ADDR); // transmit to device 0x0E
Wire.write(0x05); // z MSB reg
Wire.endTransmission(); // stop transmitting
delayMicroseconds(2); //needs at least 1.3us free time between start and stop
Wire.requestFrom(MAG_ADDR, 1); // request 1 byte
while(Wire.available()) // slave may send less than requested
{
zh = Wire.read(); // receive the byte
}
delayMicroseconds(2); //needs at least 1.3us free time between start and stop
Wire.beginTransmission(MAG_ADDR); // transmit to device 0x0E
Wire.write(0x06); // z LSB reg
Wire.endTransmission(); // stop transmitting
delayMicroseconds(2); //needs at least 1.3us free time between start and stop
Wire.requestFrom(MAG_ADDR, 1); // request 1 byte
while(Wire.available()) // slave may send less than requested
{
zl = Wire.read(); // receive the byte
}
int zout = (zl|(zh << 8)); //concatenate the MSB and LSB
return zout;
}
Links